
传递科技创新资讯 推进行业发展共赢
Date:2023-03-27Hits:
发电厂输煤栈桥内煤粉浓度大、环境昏暗、设备排列复杂,通行区域狭小、粉尘堆积严重、噪音大,如仅依靠人员或固定摄像头进行安全巡视,不仅工作环境恶劣,更难以全面、及时发现安全风险。

输煤栈桥轨道机器人
为解决这一问题,晨砻信息在输煤栈桥区域采用机器人智能巡检,将传统人工巡检向智能化、无人化转型,将“被动式巡检”变“主动式巡检”、“实时性巡检”,实现生产区域统一管控、故障预警、智能分析、减员增效等目标。
从晨砻信息在全国十多家发电厂的智能巡检机器人应用实际情况来看,输煤栈桥机器人适宜采用双圆轨道式驱动形式,机器人沿预先规划的巡检轨道路径运行,在运行过程中,输煤机器人应用热成像分析、可见光识别、视频识别、音频识别、气体检测等技术,进行皮带机异常识别、结构异常识别、皮带末端撕裂识别、皮带跑偏识别、煤分温度监测、滚轮异常温度测温、电机测温、跑冒滴漏等巡检。
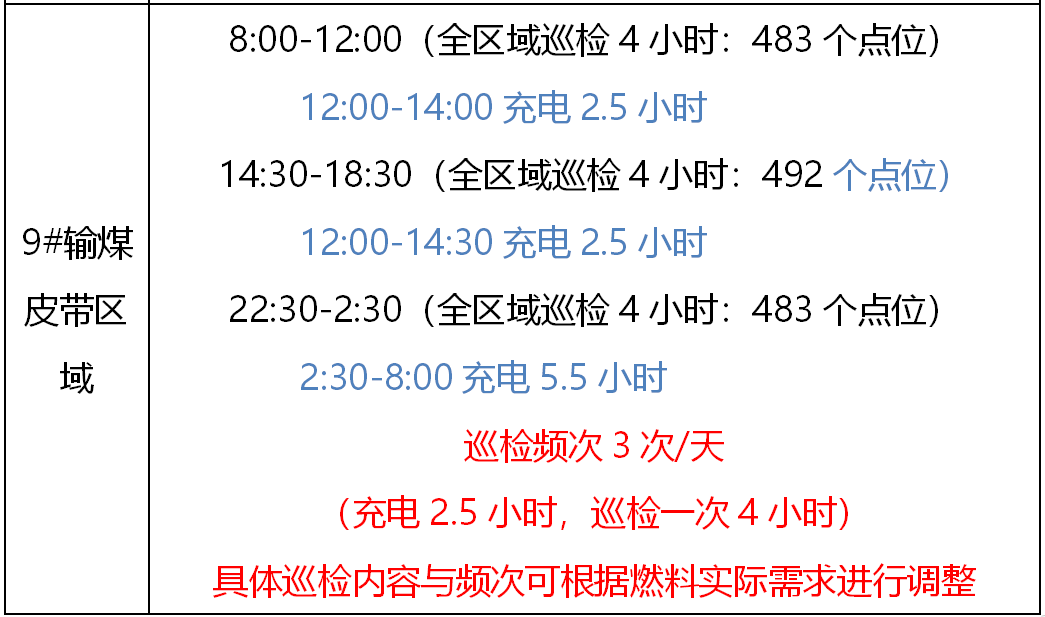
巡检策略
机器人在运行的过程中,将巡检的实时数据传输到晨砻机器人智能巡检一体化管控平台,运行人员不用前往现场即可实时对输煤栈桥进行全方位感知,全面了解现场设备及环境的运行状态,实现可视化、数字化、全方位实时巡检。
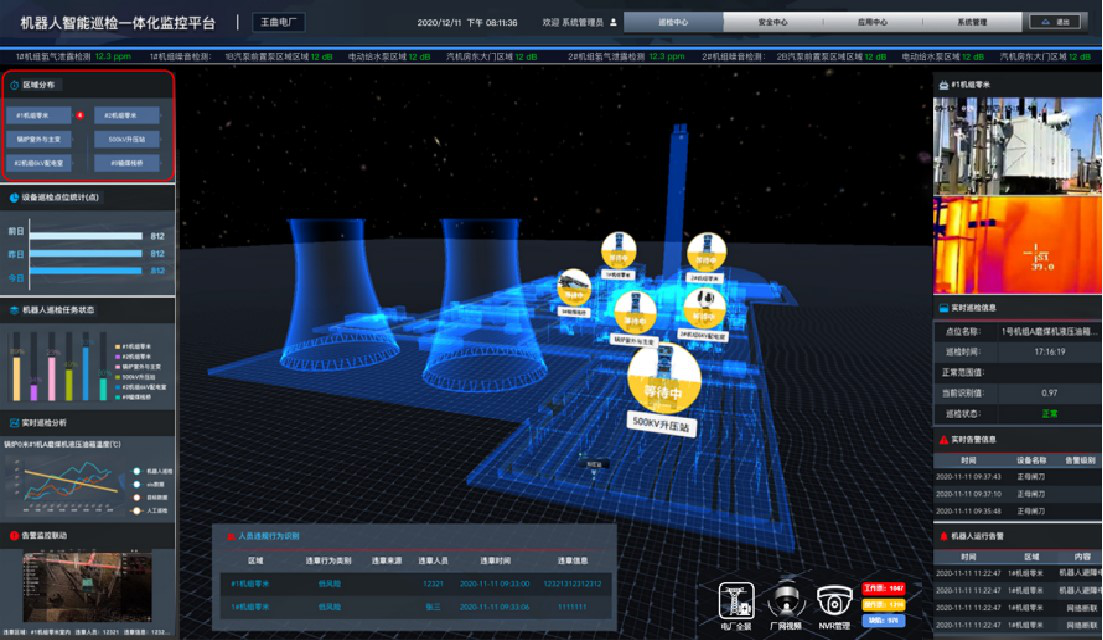
机器人智能巡检一体化管控平台
由于输煤廊道现场粉尘浓度较重,机器人长时间在廊道内运行容易积灰,影响设备正常工作(如影响可见光视频的采集)。晨砻公司自主研发一套具有专利技术的机器人自清洁装置。
机器人自清洁装置安装于机器人行进轨道上,并与自主充电设备、通讯设备进行一体化成套设计。自清洁装置内设置吹风设备、鼓风吸尘设备,在机器人行进至自清洁装置内,对机器人进行自动清洁,实现吹风+吸尘清洁功能,保障机器人的清洁度和各项功能正常的使用。
同时晨砻信息巡检机器人具有自主充电功能,机器人本体自带电池电量检测电路,且可人工设置电量报警下限,一旦机器人检测到电池电量低于设置值时则会自动停止当前巡检任务,同时发出警报,之后自主运行到清洁房中的充电点进行充电,从而保证机器人每天可以完成多次巡检任务。


Copyright © 2003-2017 秦皇岛晨砻信息科技有限公司
冀B2-20050150